Design & Development
")
National Aeronautics and Space Administration (NASA)
Client
Human Automation Teaming Interface System (HATIS)
HATIS, short for Human-Autonomy Teaming Interface System, is a software designed and developed to allow a human operator to effectively plan and supervise multiple simultaneous drone missions. HATIS provides a ground control station (GCS) interface by which an operator can perform two main functions of mission planning and, once a mission is launched, mission replanning/supervision. For both functions, HATIS was designed to provide displays showing risk, along both current and proposed routes. In addition, HATIS was designed to work with R-HATS, a software agent developed for NASA by HATS Inc. to facilitate teamwork between an automation for advanced ground dispatch station and the station’s human operator.
On this project, I served as the lead user interface and user experience designer to develop interfaces and ways for the human operator to plan missions for and supervise multiple, highly-automated unmanned aerial vehicles (UAVs). These included:
- Show at a glance status and health of multiple UAVs both during pre-mission planning stages (i.e., projected) and during ongoing missions.
- Develop techniques for route visualization and replanning. This included, for example, distinguishing between routes that are current, proposed by the automation, being edited manually, etc.
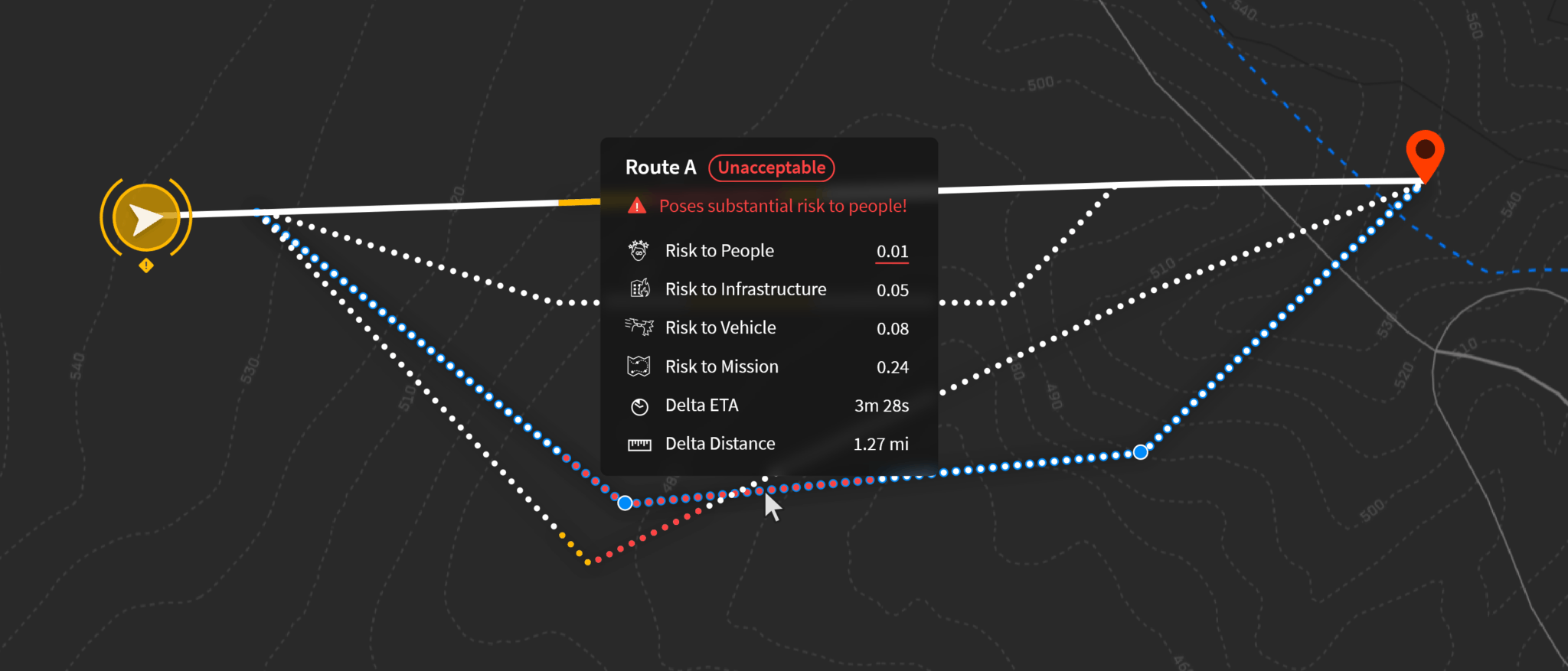
- Develop visualization techniques for displaying the quality and expected risk at each point along a route, as well as showing reasons for route quality degradation. This involved, for example, integrating information on risk to people on ground, vehicle battery health and remaining flight time, GPS quality, risk to infrastructure, risk to mission, etc. Each of these attributes involved designing additional visualizations and interactions to, for example, show contingent crash locations along route, showing areas with poor GPS quality, showing specific points along route where useful remaining battery life falls below acceptable thresholds, etc.
- Design ways to represent stay-in and stay-out zones (i.e., geofences). This also involved visualizing time-based geofences (e.g., alerting the operator of a geofence that is about to go into effect) and distinguishing between geofences of different types (e.g., residential areas, geofences for emergency vehicles, areas with bad GPS quality, etc.)
- Develop ways to keep the operator informed of the status and progress of vehicles/missions through alerts. This involved distinguishing between alerts of various levels of criticality/urgency, providing at-a-glance overview of the problem, providing quick access to detailed information if needed, and providing a way to resolve the problem through possible actions.
The visualizations and interfaces were developed for implementation using the Unity game engine and involved close collaboration with the software development team throughout the development process. Development versions of the HATIS software were demonstrated to stakeholders from NASA Ames and NASA Langley research centers. The final product was deliverd to NASA Langley for use as a testbed for the integration of highly automated UAVs into the Unmanned Aircraft System Traffic Management (UTM) ecosystem.
More information is available upon request.